Unsere Fußballroboter
Wir denken, dass der RoboCup ein Wettbewerb ist um Neues zu lernen, sich auszutauschen und Wissen weiterzugeben. Deshalb haben wir uns dazu entschieden, Dokumentationen, Schaltpläne und Programme zu veröffentlichen damit andere Teams und Maker darin Inspiration finden können und auch aus unseren Fehlern lernen können.
Hier findet Ihr von jedem Roboter der im Laufe der Jahre entstanden ist einige Bilder sowie (falls vorhanden) Dokumentationen, Schaltpläne und Programme.
Da wir natürlich nicht wollen, dass die Roboter einfach von anderen Teams nachgebaut veröffentlichen wir jedoch keine EAGLE-Dateien oder PCB-Layouts.
Unser Programmcode ist auf GitHub zu finden. Zu jedem Repository ist die zugehörige Jahreszahl angegeben:
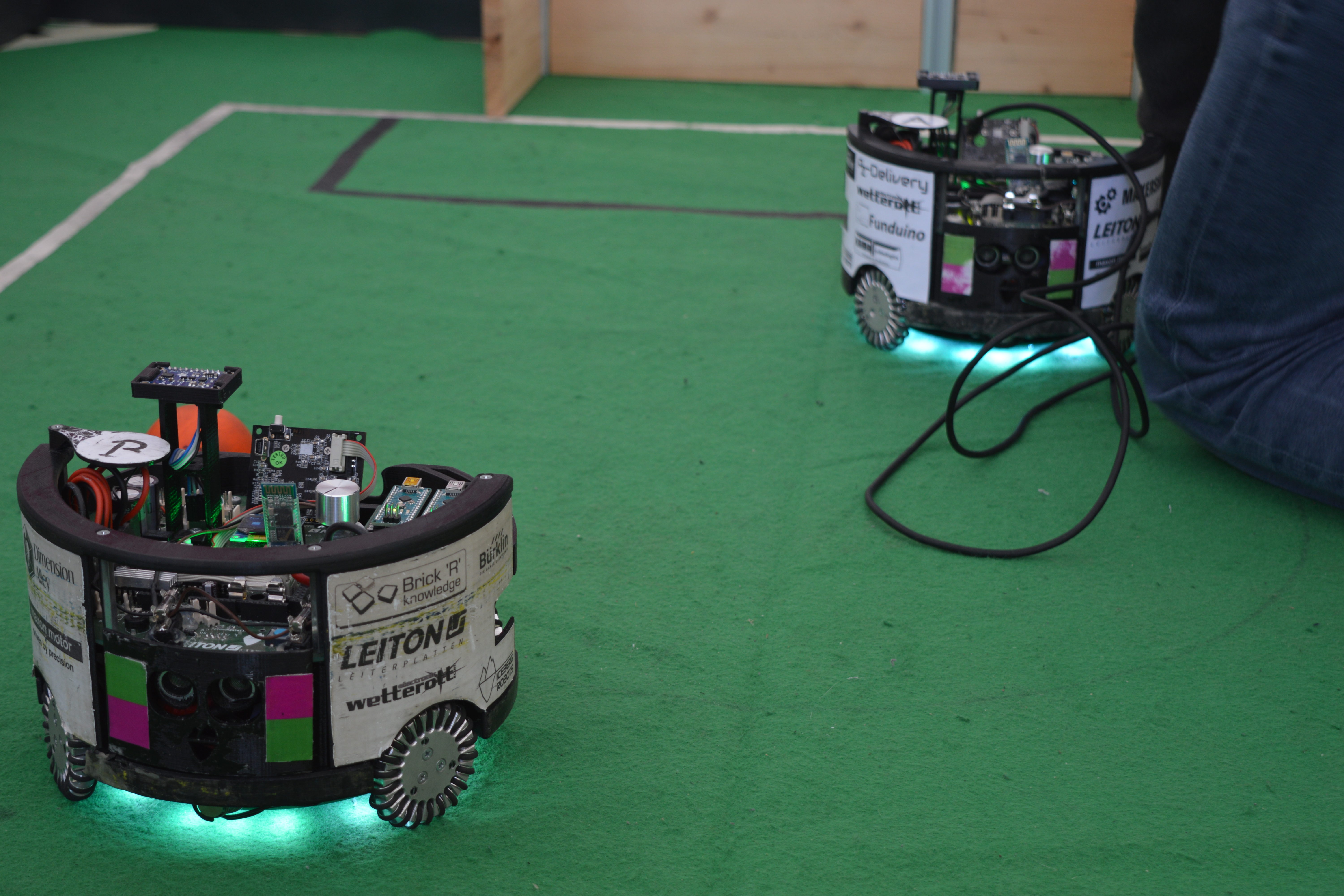
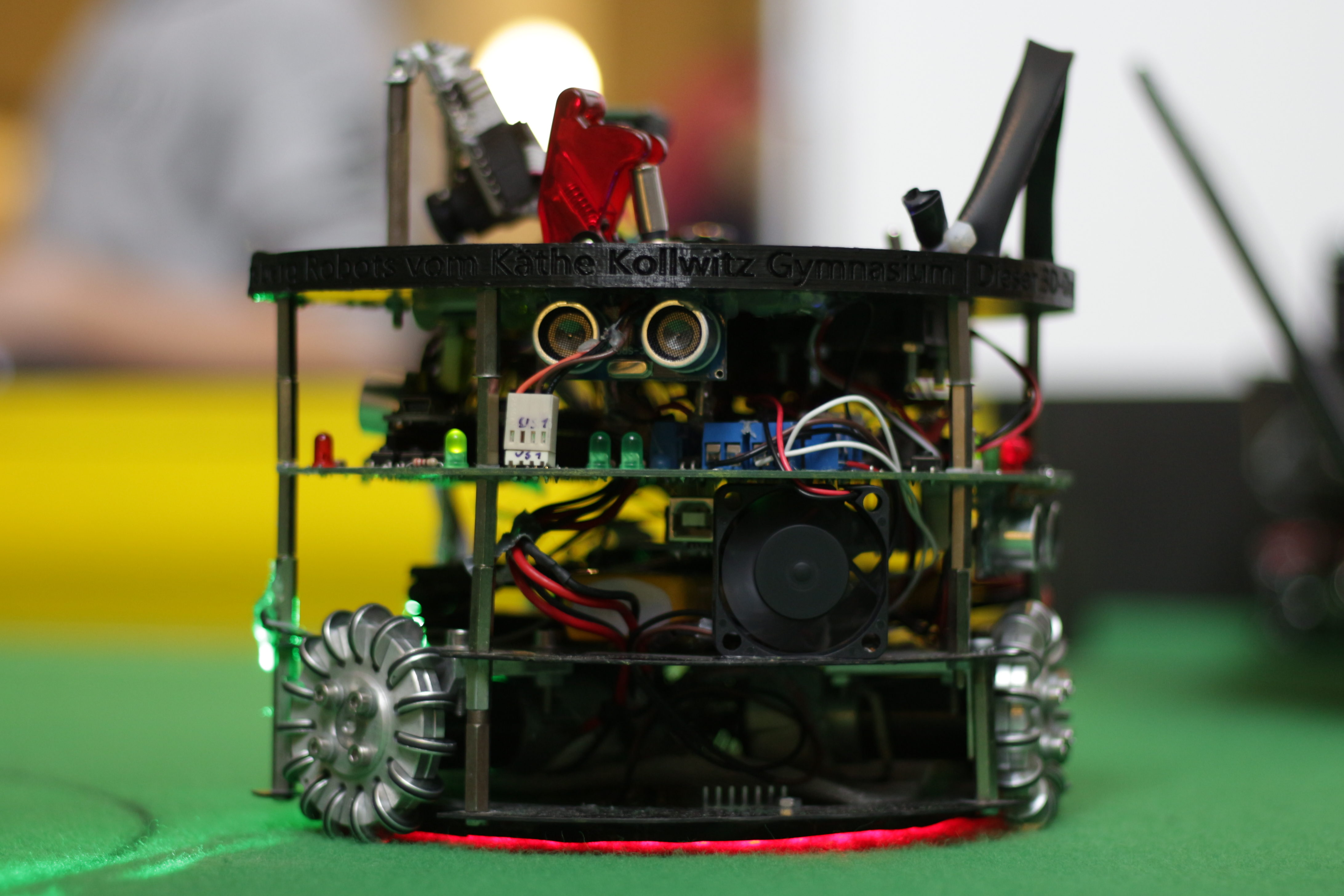
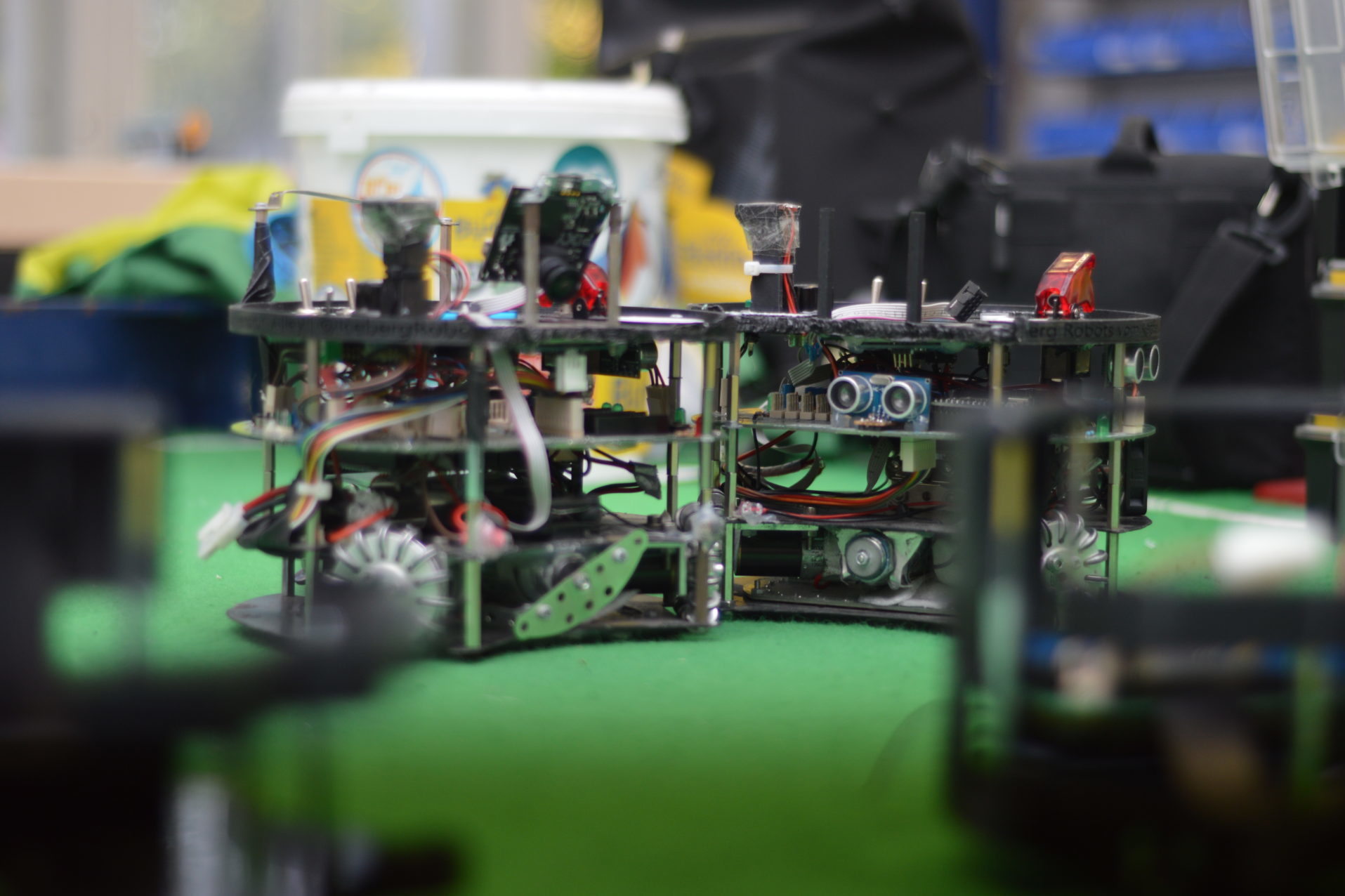
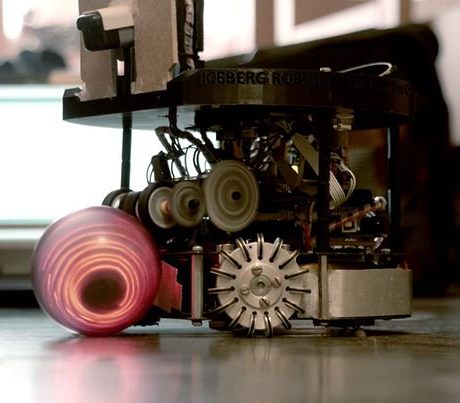
Roboter 2019




In diesem Jahr bauten wir zwei komplett neue Roboter. Der Prozess der Planung begann mit der 3D-Modellierung der Roboter. Direkt danach kam das Designen der Platinen und abschließend wurde dann alles zusammengesetzt.
Die Roboter besitzen je ein Arduino Mega 2560 als Hauptprozessor. Zur Unterstützung für die Auswertung des Bodensensors wurden die Roboter noch mit je einem Arduino Nano ausgestattet. Zusätzlich hatte jeder Roboter je zwei ATMEGA328P, die für die Auslesung und Verarbeitung der Motorencoder übernehmen.
Unsere Roboter fahren mit je vier Motoren, die wir durch die Encoder gezielt und kontrolliert ansteuern können. Die Motoren sind vom Typ DCX 22S mit 14 Watt und Encodern von Maxon Motor.
Neu in diesem Jahr ist das Blech, welches das Innere unseres Roboters schützen soll und netterweise von der Schaeffer AG hergestellt wurde. Es war hervorragend, dass sogar die Namen unserer Sponsoren auf die Bleche gedruckt wurden. Als Räder benutzten wird dann noch die Omni Wheels aus dem letzten Jahr.
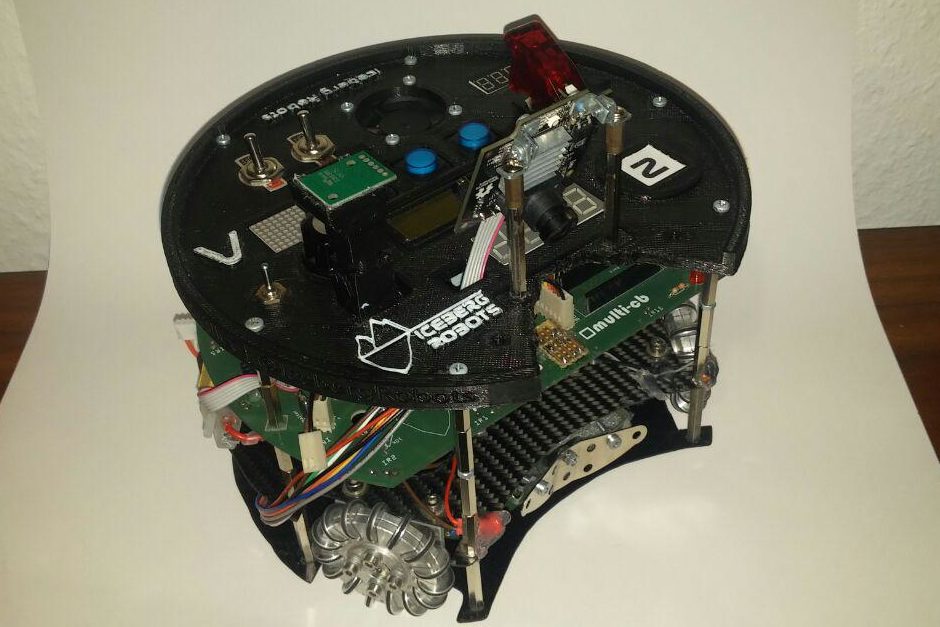
Unsere Roboter sind jeweils mit einer Pixy CMUCam5 ausgestattet.
Dazu haben wir noch je einen Schuss integriert, der aus einem Solenoid und einer Schussplatte besteht.
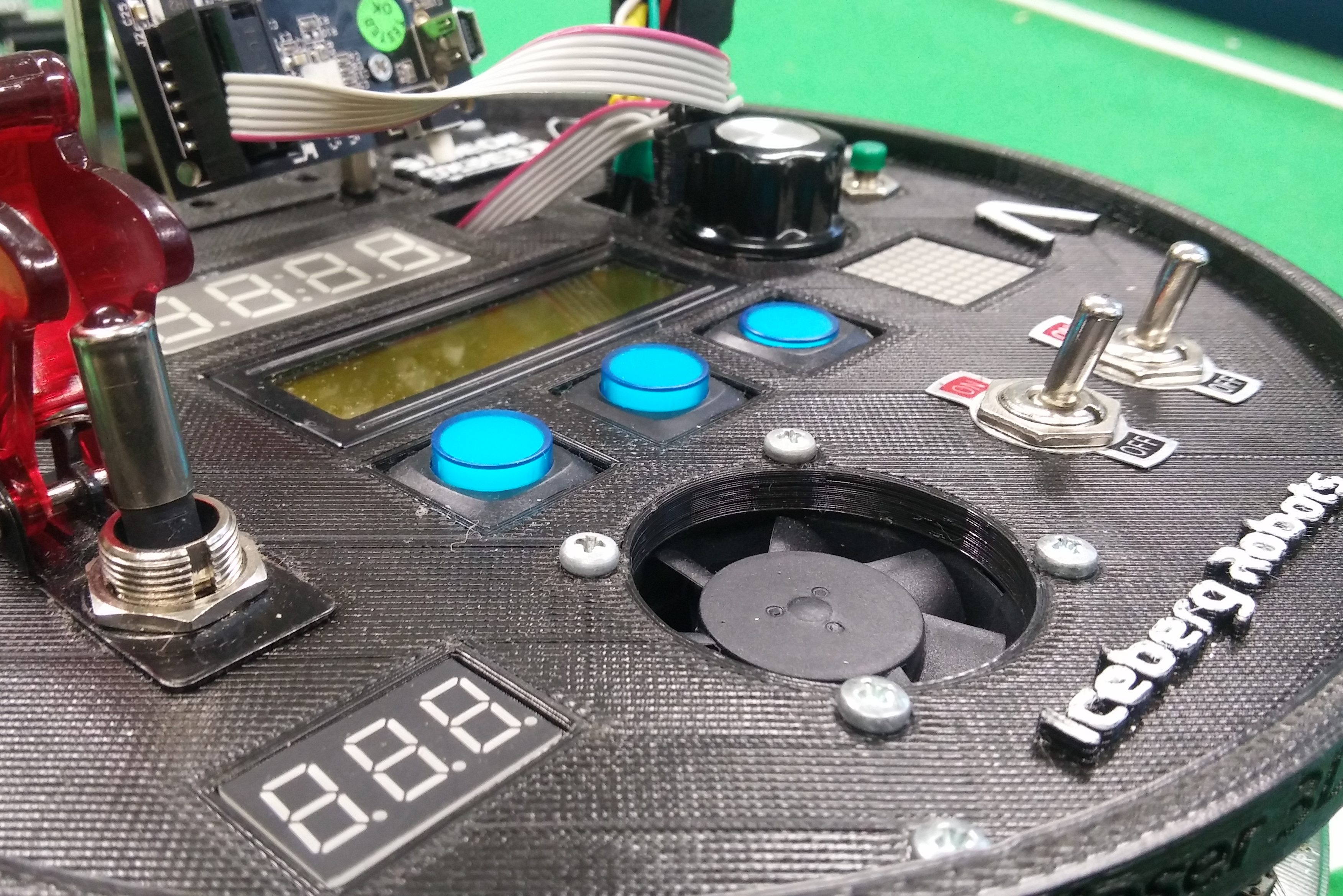
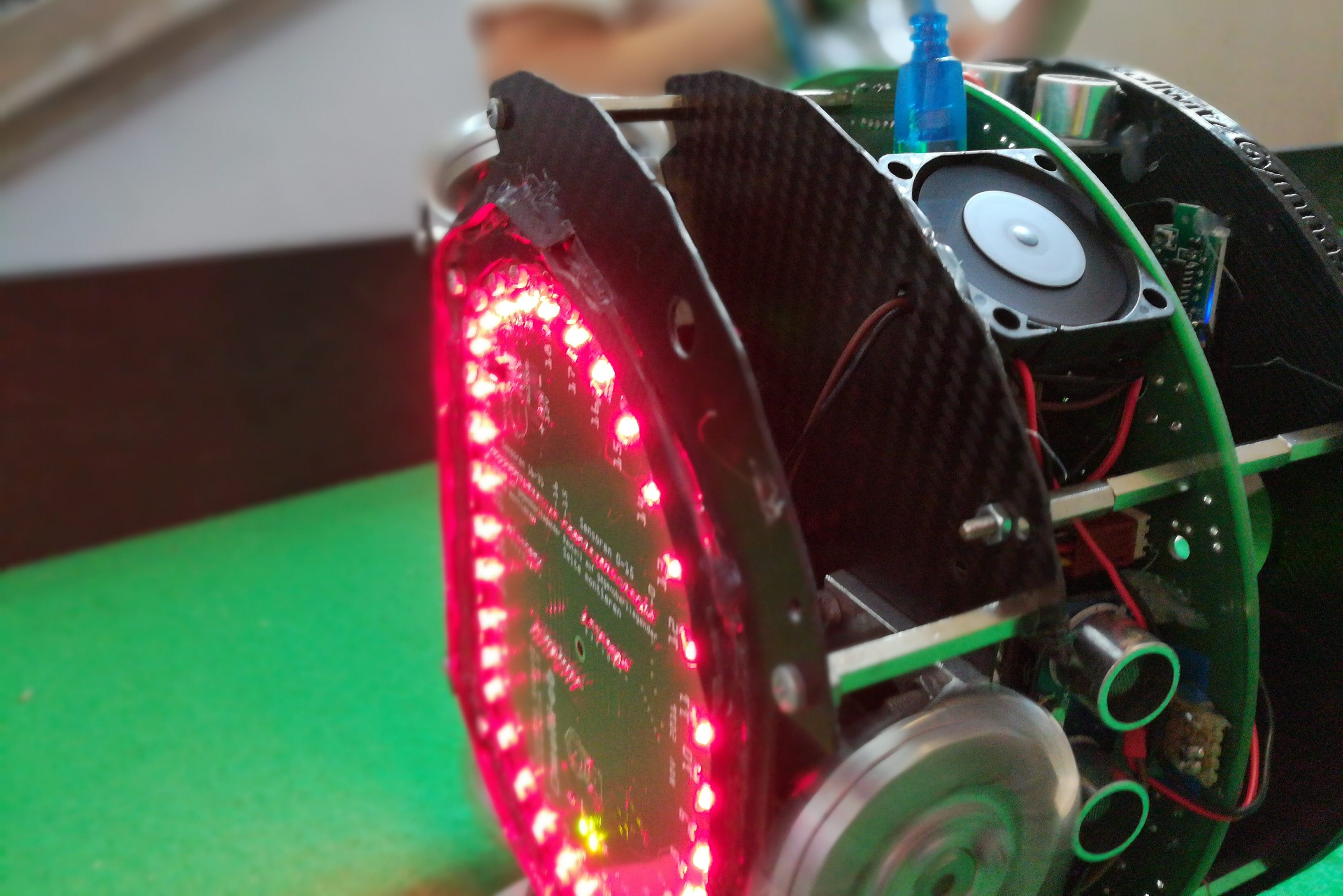
Zuletzt sind noch unsere drei Platinen zu erwähnen. Dazu gehören die Bodenplatine, die PUI (Physical User Interface) und unsere Hauptplatine. Auf der Bodenplatine befinden sich 41 Phototransitoren und 40 RGB-Leds. Die PUI dient zur Einstellung und Ausgabe von Informationen. Auf unseren Hauptplatinen findet sich Platz für die Sicherungen, Mosfets und anderen Bauteile. Hergestellt wurden die Platinen von unserem Sponsor Leiton.
Roboter 2018

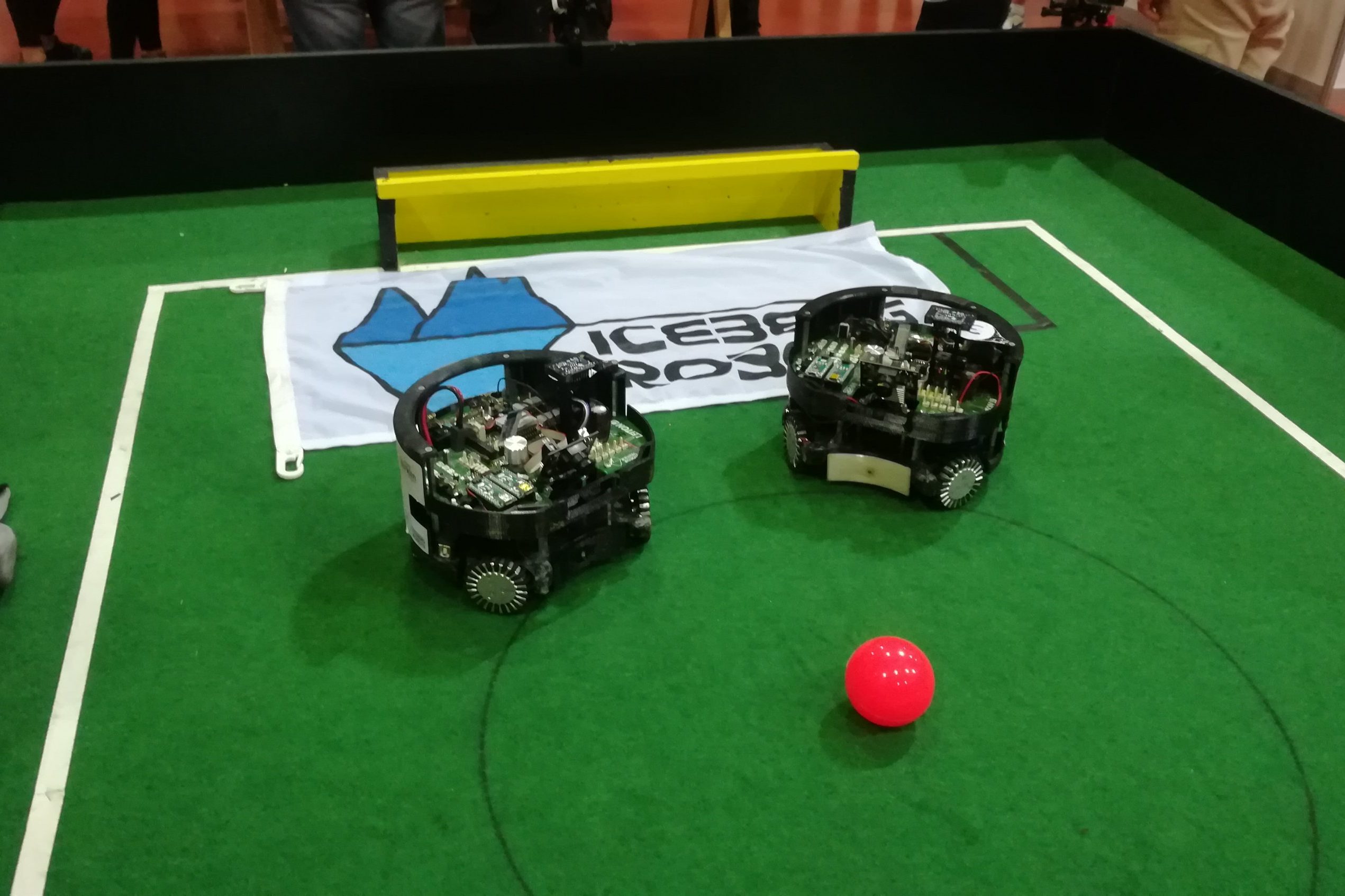


In diesem Jahr hat sich sehr viel getan, unsere Roboter wurden von Grund auf neu aufgebaut.
Erstmals planten wir den Roboter komplett in einem 3D-Modell bevor wir anfingen ihn zu bauen.
Die Steuereinheit des Roboters ist ein Arduino Mega 2560. Unterstützt wird dieser wie im vorherigen Jahr von zwei Coprozessoren in Form von Arduino Nanos.
Auch die Platine entwickelten wir neu. In diesem Jahr setzten wir verstärkt auf SMD-Bauteile und fügten einige Sicherheitselemente wie Sicherungen hinzu. Auch ein kleines OLED-Display findet auf der neuen Platine Platz. Die Platinen wurden uns von Leiton gesponsert.
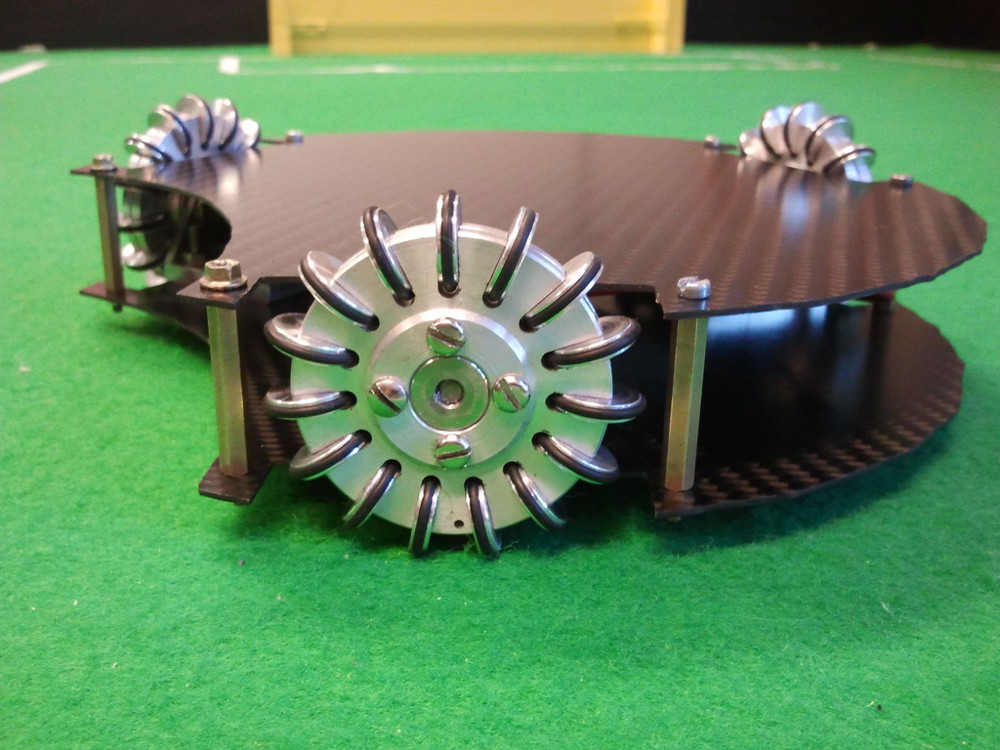
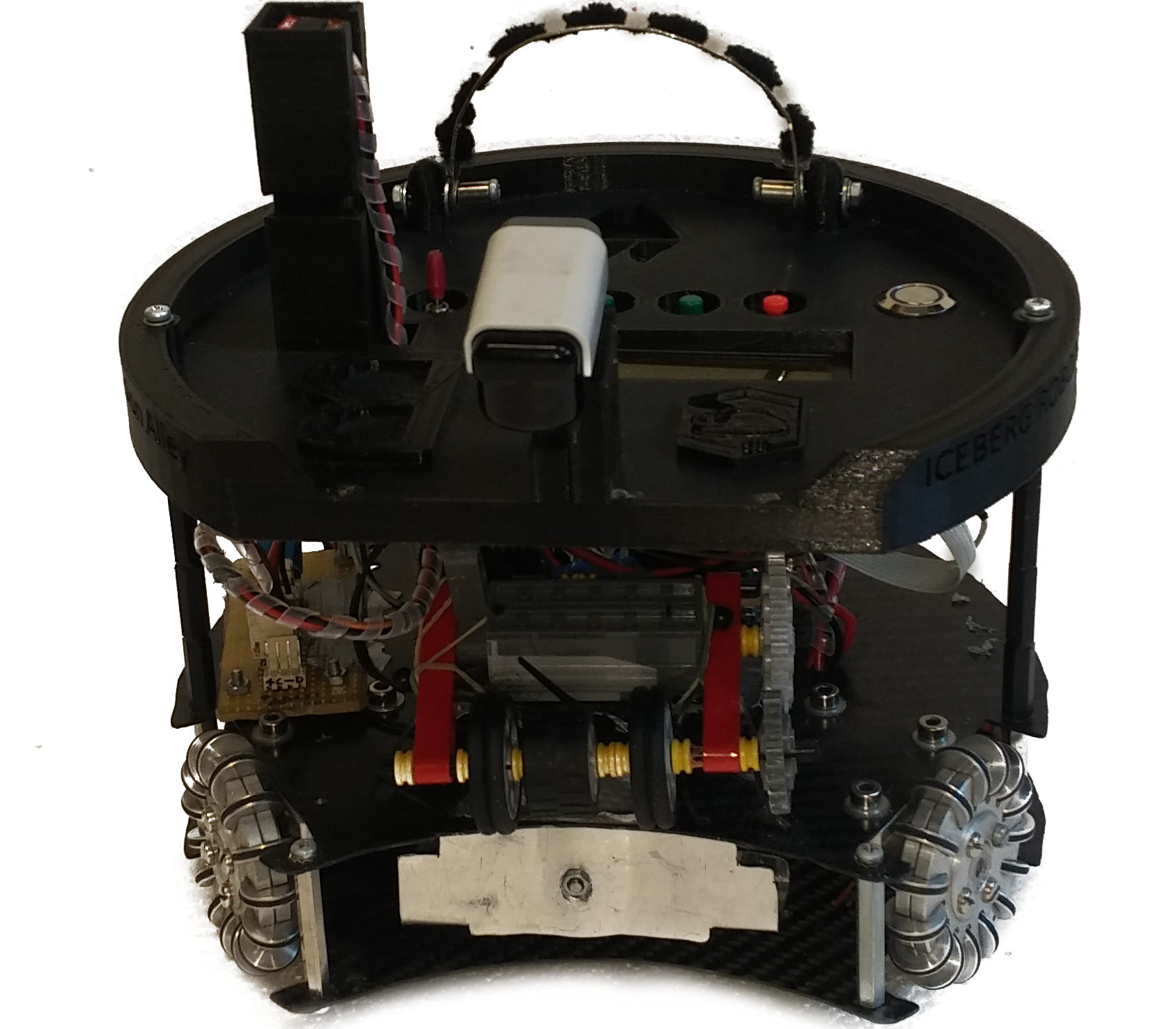
Ein besonderes Merkmal des neuen Roboters sind die selbst entwickelten OmniWheels, welche in einer Zusammenarbeit mit der Schaeffer Ag entstanden.
Statt wie im Vorjahr drei verwenden wir in diesem Jahr vier Räder. Als Motoren kommen 14W Maxon DC-Motoren zum Einsatz.
Das Chassis besteht fast komplett aus 3D-Drucken von Dimension Alley.
Ein im hinteren Teil des Roboters angebrachter Solenoid dient als Schuss.
Die Bodenplatine des Roboters hat 16 ringförmig angelegte individuell adressierbare RGB-LEDs. Das hilft uns zwar nicht bei der Linienerkennung, sorgt aber für tolle Animationen. 🙂
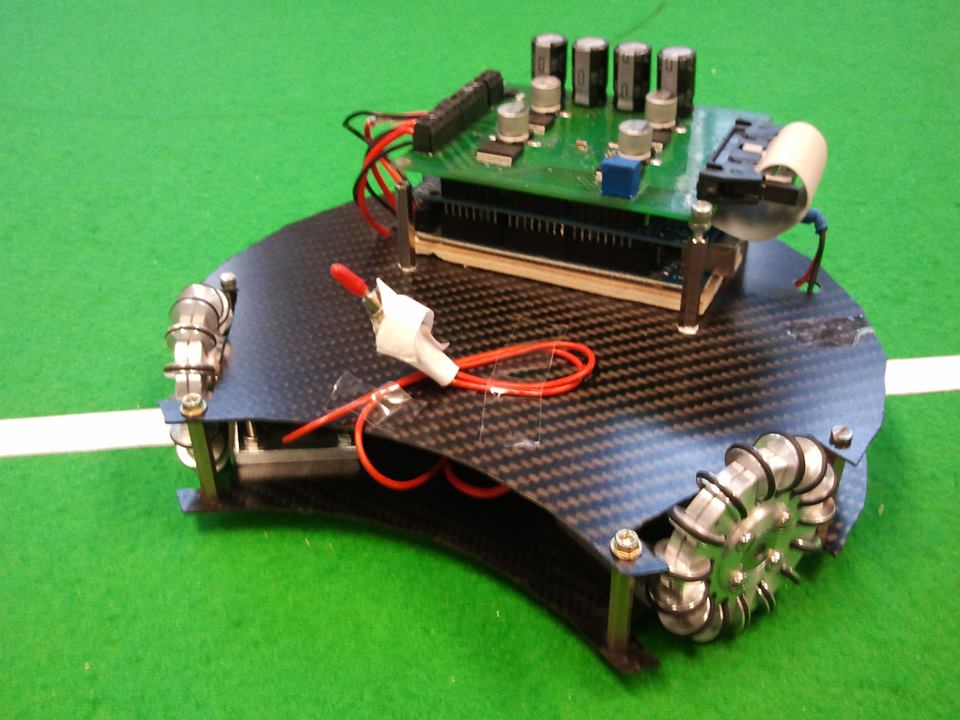
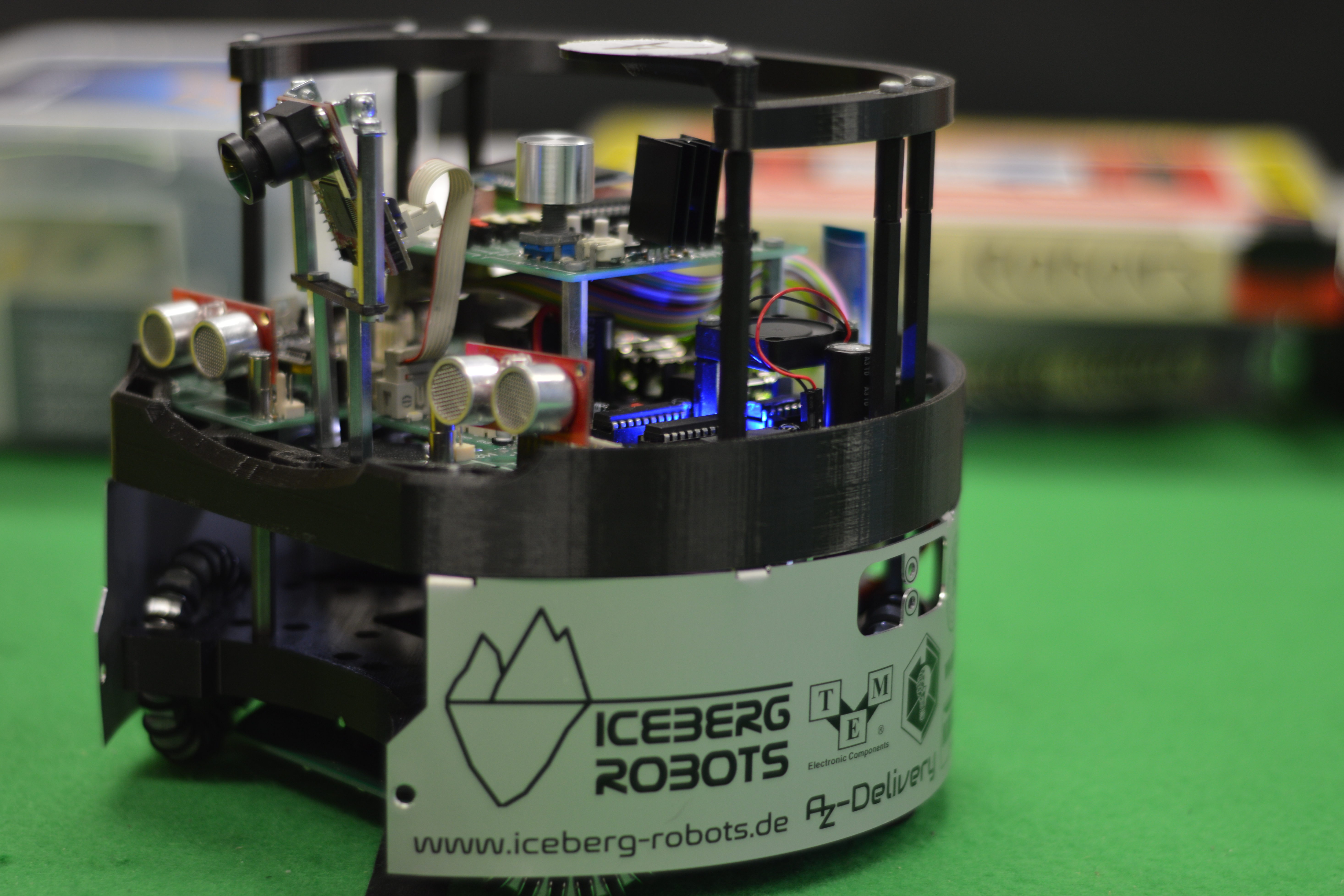
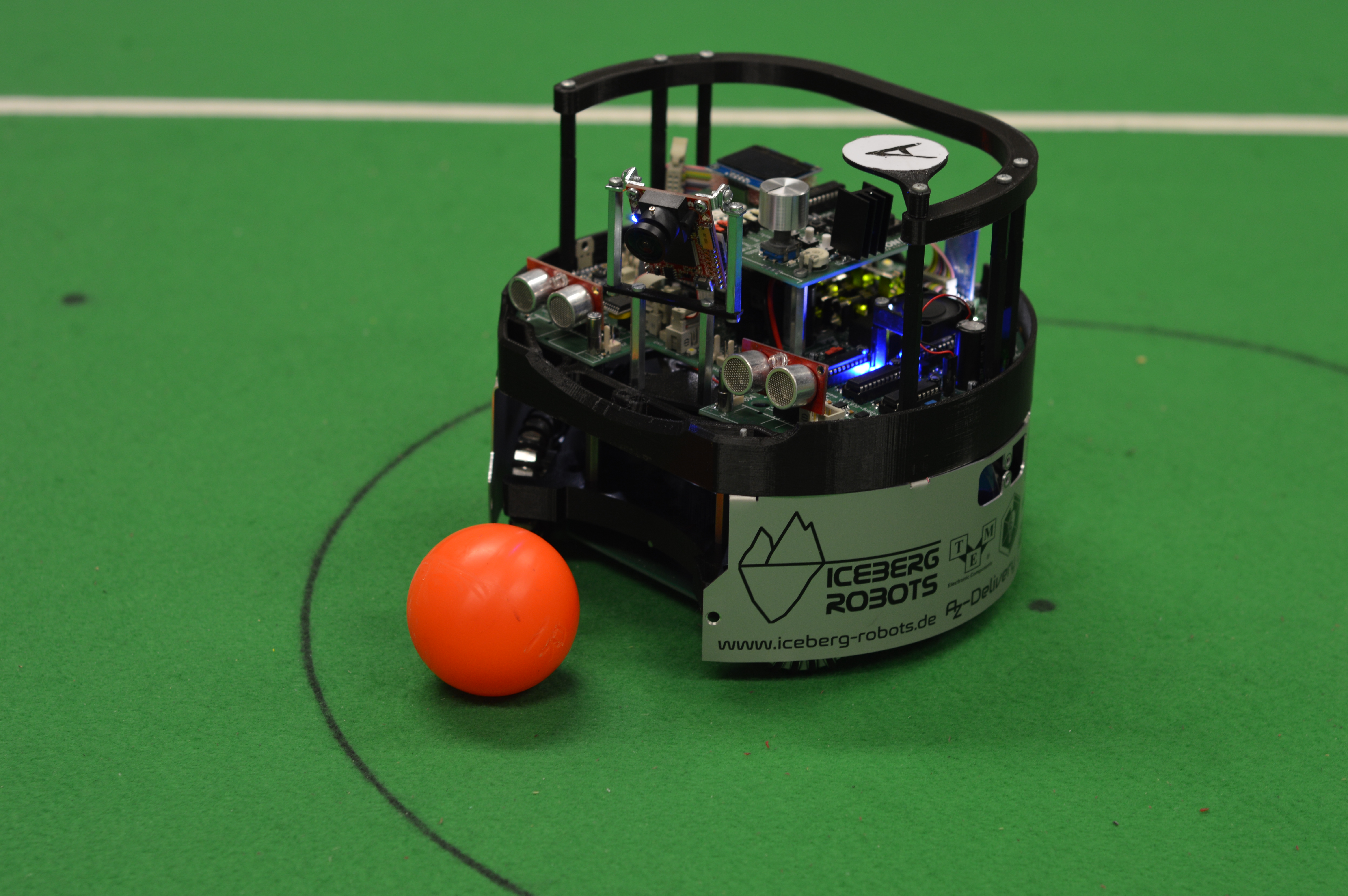
Roboter 2017



In diesem Jahr benutzen wir erstmals eine Kamera zur Ballerkennung. Dazu benutzen wir die Pixy CMUcam5, da diese über eine integrierte Bildverarbeitung verfügt.
In diesem Jahr kommt erstmals eine selbst entwickelte Platine zum Einsatz. Unsere drei OmniWheels werden von 9W DC-Motoren betrieben.
Das besondere an dem Roboter ist der obere 3D-Druck auf dem sich unsere Ein- und Ausgabeelemente befinden.
Das Chassis besteht aus dem Carbon, welches wir bereits in den letzten Jahren verwendet haben.
Der Roboter verfügt über einen Schuss, jedoch nicht mehr über einen Dribbler.
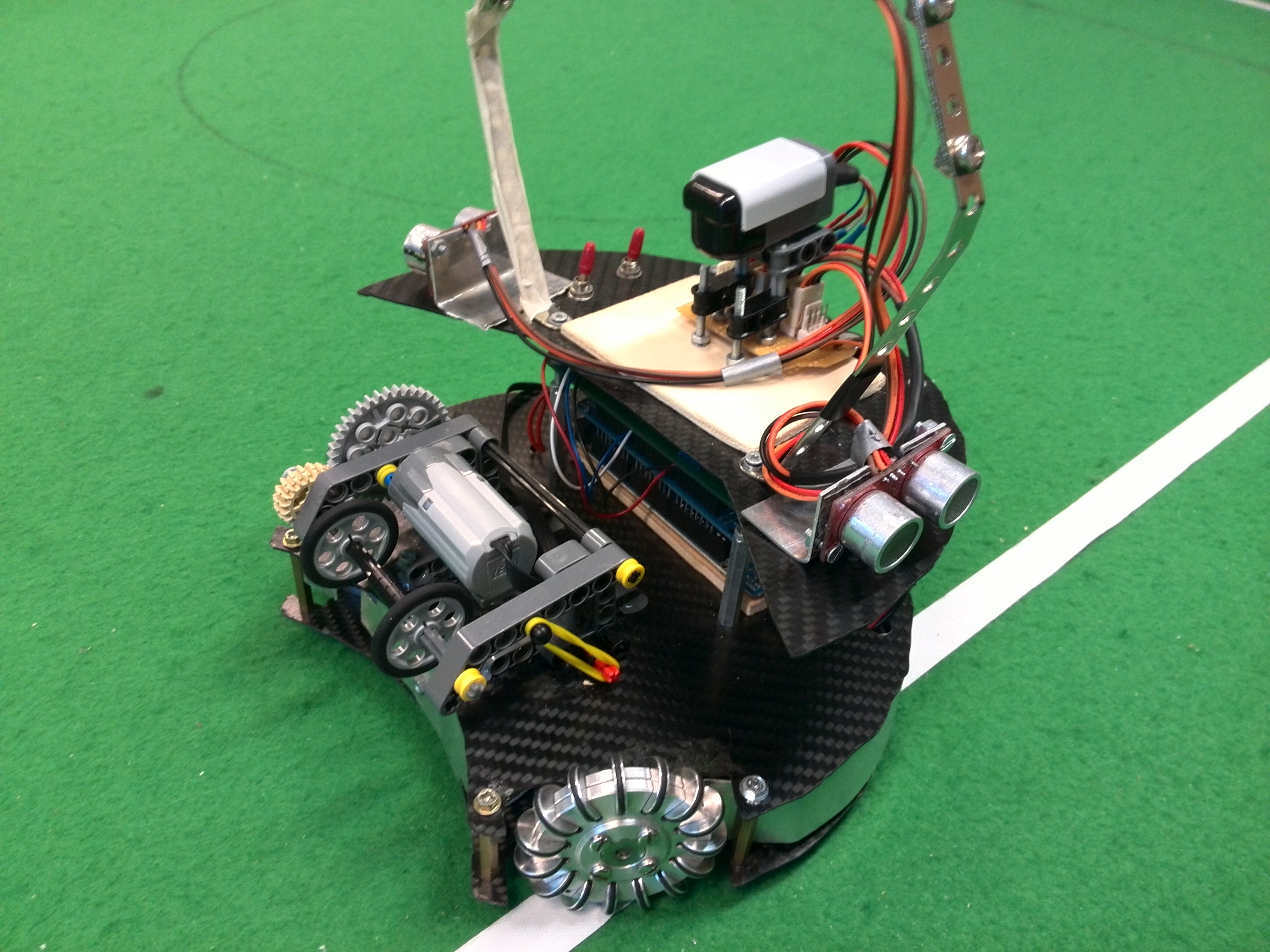
Roboter 2016



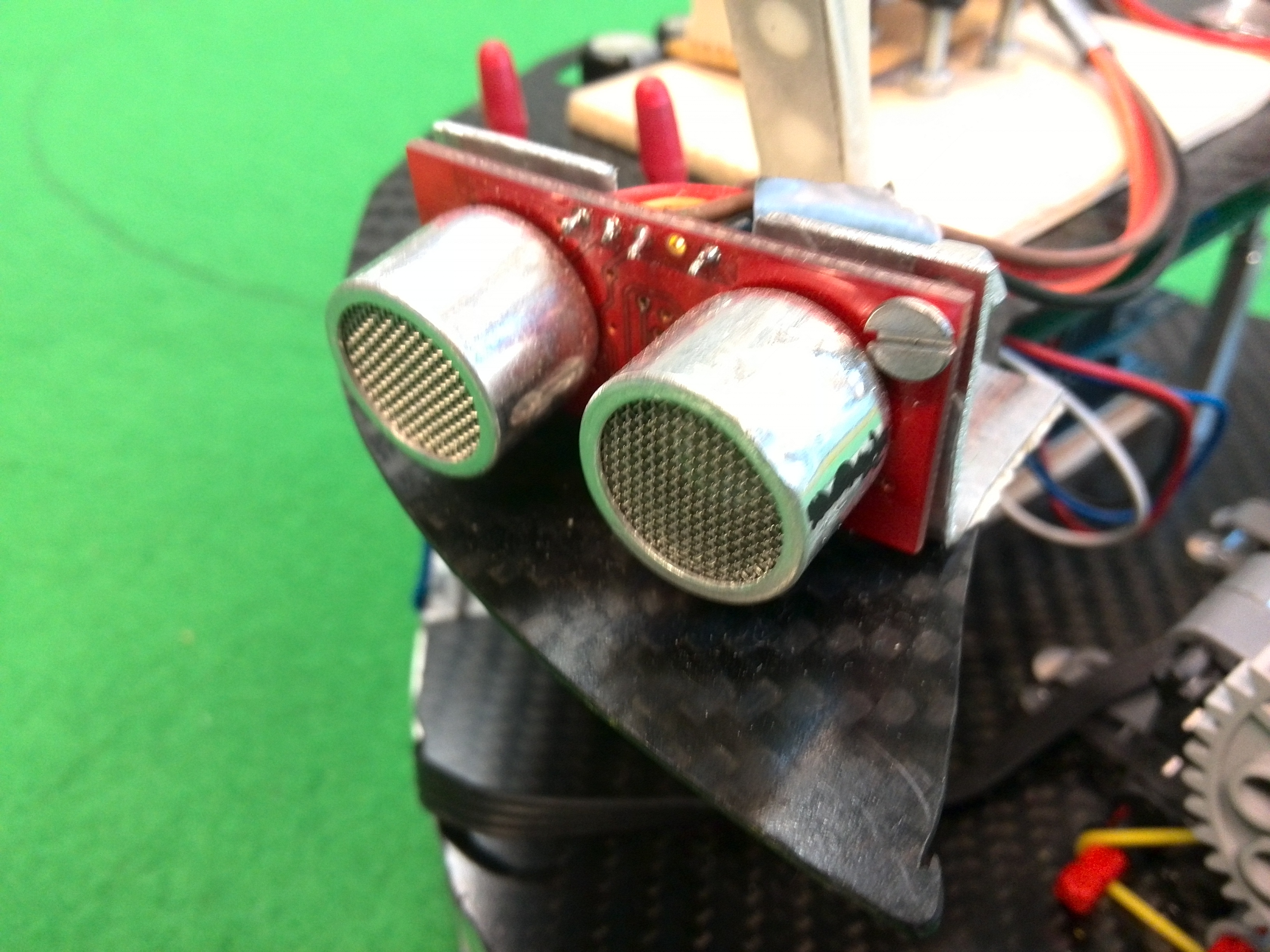
In deisem Jahr wurde noch ein passiver Ball verwendet. Als Sensoren benutzten wir die SRF08-Ultraschallsensoren, einen HMC6352-Kompasssensor und einen HiTechnic Lego IR-Seeker.
In diesem Jahr hatten wir einen Dribbler um den Ball besser zu kontrollieren. Dieser bestand aus Lego-Teilen.
Roboter 2015


Roboter 2014